| Home | Job | Pinball | Photo Album | Automotive | Press/Awards | Contact |

{kind=link}
Satellite Servicing Capabilities Office

The Raven Project
Introduction
An important technology that is needed for robotic satellite servicing is the ability to fly up to a spacecraft and to circle around it to find a location to grasp and dock. Due to time delays, this needs to occur autonomously with sensors and computer systems to guide the servicer onto the right location. One way to test this technology is to place a demonstration system onto the Space Station and view the incoming spacecrafts that are flying up to perform periodic resupply missions. The benefit of this sensor system to the ISS is the ability to have a "third-party" verification of the correctness of the incoming spacecraft's trajectory.

Space craft coming up to the International Space Station being viewed by
a sensor package (orange and yellow cones) to verify their trajectory.
Image from here.
Raven
Raven is a project that will fullfill the role that is described above. My role on this project is the Electrical Lead, responsible for the electrical design and its integration into the Space Station interfaces. The system will have three main sensors:
In addition to the above sensors, the other main components are:

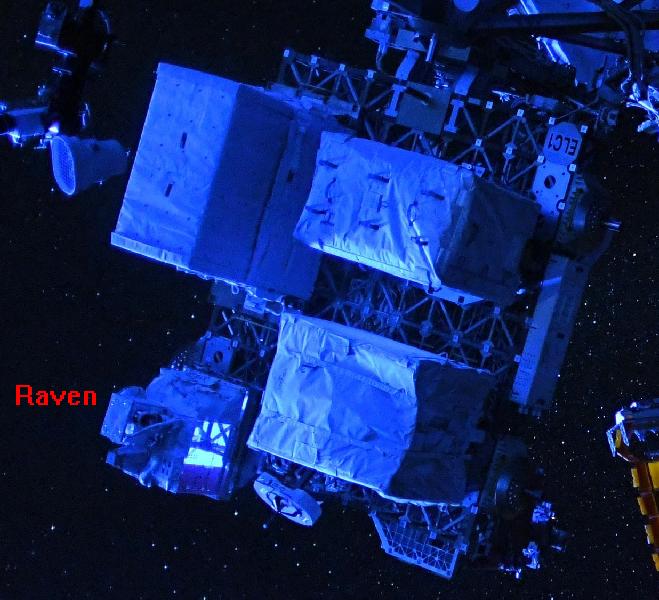
Raven will be located on the 'under' side, or Nadir side to view incoming space crafts.
It will be on ELC-1 (bottom right white circle). ISS travels towards you in this view.
Development
I started work on Raven in September 2013. The initial phase consisted of understanding what sensors we were going to use and finding a mechanism and motors for the gimbal actuator. By April 2014, the electrical design was set, and I had my Electrical Peer Review that month in front of a review panel. A large part of the design had already been tested in various forms. Our project's CDR (Critical Design Review) was in May 2014. At that point, we started the flight construction in earnest, and started system integration of the flight parts at the end of 2014. We then started environmental testing in early 2015.
Construction and test
One of the first items we received was the two-axis gimbal, and that is shown below. This is our key mechanism that will position the Raven Sensor Enclosure (with the cameras above) to keep the target space craft in view.

The two axis gimbal motor system for the pan-tilt control.
The unit bolts to the base of Raven on the right side,
and the Sensor Enclosure bolts the large circle on the left.
(photo from the vendor website).
Unlike our previous projects, where we are fastened directly to an ELC (Express Logistics Carrier) location, we will in this case be perched on top of another experimental platform called STP-H5. The 'bunker' or box for the latter is shown in the image below. This mockup allowed us to verify the volume swept of the RSE, and would be the wiring mockup that will be used to build the system wiring harness.

In the image above, you can see the first representation of the RSE, which is the large grey aluminum box at the top. The top left square opening is for the RNS. The top right for the IRCam, and the bottom two round ones are for VNS.



The series of first successful images. This one from the visible light camera (RNS).

This second image from the IR Camera.

Finally, this one from the LIDAR. The images are fuzzy because the focus
of the system is for distant objects. This last image took a week to obtain
because of a software issue. After much troubleshooting the problem was
located and it was very meaningful.
Images shot in January 2015.

While we test the main part of Raven, we also put the computer
(SpaceCube2) into its own thermal cycling test (2/15).
The unit under test can be seen inside the open door.

At the end of February 15, we left the cleanroom and boarded the elevator to go
downstairs to the vibration test chambers.

The moment Raven is craned onto the vibration table for its test.
The table shakes the hardware so violently that you must wear
hearing protection to be in this room when the test is going on.

Image from Craig Huber. He was shooting this behind me.

After vibe, we transferred to the Thermal Vacuum Chamber (Facility 238).

View through the personnel access door.

Raven inside the chamber divided into two zones. Raven Minus and SpaceCube (covered with gold foil on right).

View through the access door.

We use a lot of GN2, and it looks like I am walking through a cloud of it.

Fuzzy preview image from my GoPro of the console operators at GSFC TVac tests.

Diagram of payloads on STP-H5. The Earth's surface is in the direction
of the "Nadir" direction. Image from here.

A problem was found during our installation of Raven onto STP-H5. Due to an error
in a drawing, the Raven baseplate would not fit onto the walls of the STP bunker.
The best way to solve the problem was to redrill the baseplate. To check our new locations, we used a calibration system shown here as the silver
arm with the word "EDGE" on it.

Our integration lab at the Johnson Space Center happened to be on the top floor of
the Building 30 Mission Control Center. It was just down the hall from the
historic Apollo Control Room. Called the MOCR, it has been preserved
historically.

Photo of the STP-H5 payload with Raven on top.
Image from here.

We were then shipped to Langley Research Center for system-level
Thermal-Vacuum test in October 2015. You can see Raven on
top of the blanketed STP-H5 chassis in the opening of the chamber.
It was here that a second problem was found. More on this below.

After that, the entire payload was shipped to the Kennedy Space Center for launch site integration at the Space Station Processing Facility in November 2015.
Image from here.
Launch
Raven launched as part of the STP-H5 experiment on SpaceX-10 / CRS-10 on 2/20/2017. I was planning on seeing this event, but unfortunately, we suddenly lost our cousin Dr. Chee Mun Lum and I went to Canada to attend his funeral.


An important technology that is needed for robotic satellite servicing is the ability to fly up to a spacecraft and to circle around it to find a location to grasp and dock. Due to time delays, this needs to occur autonomously with sensors and computer systems to guide the servicer onto the right location. One way to test this technology is to place a demonstration system onto the Space Station and view the incoming spacecrafts that are flying up to perform periodic resupply missions. The benefit of this sensor system to the ISS is the ability to have a "third-party" verification of the correctness of the incoming spacecraft's trajectory.
Space craft coming up to the International Space Station being viewed by
a sensor package (orange and yellow cones) to verify their trajectory.
Image from here.
Raven
Raven is a project that will fullfill the role that is described above. My role on this project is the Electrical Lead, responsible for the electrical design and its integration into the Space Station interfaces. The system will have three main sensors:
- The first, named VNS (Vision Navigation System), is a long wavelength infra red LIDAR system. It will be able to 'image' the target by gathering a point cloud of range. This will be especially useful to obtain the shape and pose (pointing direction) of the incoming spacecraft. Our LIDAR unit has flown in space before on the STS-134 Space Shuttle mission in 2011.
- The second is a long wavelength Infra Red imaging sensor, called IRCam. It is able to see without visible light, and can thus work in the shadow of the Earth. This technology has also flown in space on STS-128 and STS-131. The resolution of this imager is 640x480, and is sensitive from 8-14 um.
- Finally, the third sensor is a visible light camera with a zoom and focus motor, called RNS (Relative Navigation Sensor). The camera has also flown in space before on the final Hubble Servicing Mission SM-4/STS-125. Originally built by MDA in Canada, its resolution is 1kx1k in the visible band.
In addition to the above sensors, the other main components are:
- Our main computer willl be a (now standard Goddard component) SpaceCube 2.0. It has three Virtex 5 FPGAs for the computing fabric.
- The motor driver electronics, which drives the two motors of the gimbal and the two motors in the RNS.
- The AEB (Auxiliary Electronics Box),
which provides interface hardware to unify the entire system together.
Raven will be located on the 'under' side, or Nadir side to view incoming space crafts.
It will be on ELC-1 (bottom right white circle). ISS travels towards you in this view.
Development
I started work on Raven in September 2013. The initial phase consisted of understanding what sensors we were going to use and finding a mechanism and motors for the gimbal actuator. By April 2014, the electrical design was set, and I had my Electrical Peer Review that month in front of a review panel. A large part of the design had already been tested in various forms. Our project's CDR (Critical Design Review) was in May 2014. At that point, we started the flight construction in earnest, and started system integration of the flight parts at the end of 2014. We then started environmental testing in early 2015.
Construction and test
One of the first items we received was the two-axis gimbal, and that is shown below. This is our key mechanism that will position the Raven Sensor Enclosure (with the cameras above) to keep the target space craft in view.
The two axis gimbal motor system for the pan-tilt control.
The unit bolts to the base of Raven on the right side,
and the Sensor Enclosure bolts the large circle on the left.
(photo from the vendor website).
Unlike our previous projects, where we are fastened directly to an ELC (Express Logistics Carrier) location, we will in this case be perched on top of another experimental platform called STP-H5. The 'bunker' or box for the latter is shown in the image below. This mockup allowed us to verify the volume swept of the RSE, and would be the wiring mockup that will be used to build the system wiring harness.
We travelled to NRL
to check out the wooden mockup of STP-H5.
The aluminum box at the top (being held) is the RSE (Raven Sensor Enclosure),
and you can see the mockup of the gimbal bolted to it.
The aluminum box at the top (being held) is the RSE (Raven Sensor Enclosure),
and you can see the mockup of the gimbal bolted to it.
In the image above, you can see the first representation of the RSE, which is the large grey aluminum box at the top. The top left square opening is for the RNS. The top right for the IRCam, and the bottom two round ones are for VNS.
Closeup of our IR Camera.
Note the beautiful purple color of the lens. Since
it is
only using the IR portion of the spectrum, shorter wavelength light can be
reflected.
only using the IR portion of the spectrum, shorter wavelength light can be
reflected.
One of the new designs
for this project is the Auxiliary Electronics Box (AEB).
Here it is being bolted onto the vibration table for its strength test (12/14).
Here it is being bolted onto the vibration table for its strength test (12/14).
Following vibe test, the
unit is placed inside a vacuum chamber and the temperature
is cycled cold and hot to simulate the effects of being in space (12/14).
is cycled cold and hot to simulate the effects of being in space (12/14).
EL ROM from Edward Cheung on Vimeo.
Time-Lapse of Range of Motion Test shows the tilt function working.The series of first successful images. This one from the visible light camera (RNS).
This second image from the IR Camera.
Finally, this one from the LIDAR. The images are fuzzy because the focus
of the system is for distant objects. This last image took a week to obtain
because of a software issue. After much troubleshooting the problem was
located and it was very meaningful.
Images shot in January 2015.
While we test the main part of Raven, we also put the computer
(SpaceCube2) into its own thermal cycling test (2/15).
The unit under test can be seen inside the open door.
At the end of February 15, we left the cleanroom and boarded the elevator to go
downstairs to the vibration test chambers.
The moment Raven is craned onto the vibration table for its test.
The table shakes the hardware so violently that you must wear
hearing protection to be in this room when the test is going on.
Image from Craig Huber. He was shooting this behind me.
After vibe, we transferred to the Thermal Vacuum Chamber (Facility 238).
View through the personnel access door.
Raven inside the chamber divided into two zones. Raven Minus and SpaceCube (covered with gold foil on right).
View through the access door.
We use a lot of GN2, and it looks like I am walking through a cloud of it.
Fuzzy preview image from my GoPro of the console operators at GSFC TVac tests.
After
Thermal-Vacuum testing at GSFC, Raven was shipped to Johnson Space
Center to be integrated onto STP-H5 in May 2015. This latter
mission is our host on the ELC platform, and has over a dozen other
experiments integrated onto it. As you can see in the diagram
below, Raven sits on the very top of the module, and represents their
flagship payload. As you can also see in the bottom image,
Raven
is meant to view down onto the Earth and will be able to view incoming
resupply vehicles.
Diagram of payloads on STP-H5. The Earth's surface is in the direction
of the "Nadir" direction. Image from here.
A problem was found during our installation of Raven onto STP-H5. Due to an error
in a drawing, the Raven baseplate would not fit onto the walls of the STP bunker.
The best way to solve the problem was to redrill the baseplate. To check our new locations, we used a calibration system shown here as the silver
arm with the word "EDGE" on it.
Our integration lab at the Johnson Space Center happened to be on the top floor of
the Building 30 Mission Control Center. It was just down the hall from the
historic Apollo Control Room. Called the MOCR, it has been preserved
historically.
Photo of the STP-H5 payload with Raven on top.
Image from here.
We were then shipped to Langley Research Center for system-level
Thermal-Vacuum test in October 2015. You can see Raven on
top of the blanketed STP-H5 chassis in the opening of the chamber.
It was here that a second problem was found. More on this below.
After that, the entire payload was shipped to the Kennedy Space Center for launch site integration at the Space Station Processing Facility in November 2015.
Image from here.
Launch
Raven launched as part of the STP-H5 experiment on SpaceX-10 / CRS-10 on 2/20/2017. I was planning on seeing this event, but unfortunately, we suddenly lost our cousin Dr. Chee Mun Lum and I went to Canada to attend his funeral.
SpaceX-X (aka CRS-X)
launched from the historic Apollo and Shuttle pad 39A.
I was at this pad years ago for the final Shuttle mission.
The above is a post from Elon Musk about the test firing
of the engines days before launch.

Launch of CRS-X from LC-39A the historic Apollo and Shuttle pad.
I was at this pad years ago for the final Shuttle mission.
The above is a post from Elon Musk about the test firing
of the engines days before launch.
Launch of CRS-X from LC-39A the historic Apollo and Shuttle pad.
This
is the image of Raven (bottom) sitting on top of STP-H5, sitting inside
the CRS-X capsule. This view taken from the booster as its
separates from the capsule.

Raven and STP-H5 in space on the end of the SPDM (Dextre) robot arm. We are about
to be set down on our ELC-1 site where we will do our imaging.

One very important person that worked tirelessly on Raven was our Production Lead, Larry Green. He fought a brave fight against his abdominal cancer and passed away in 2016.
We attached a small memento to him inside Raven and I had the privilege of eulogizing him at his funeral and presented this to his widow.
Over the years, I relied often on Larry. His deep experience building space flight hardware was a good practical compliment to my theoretical and design background.
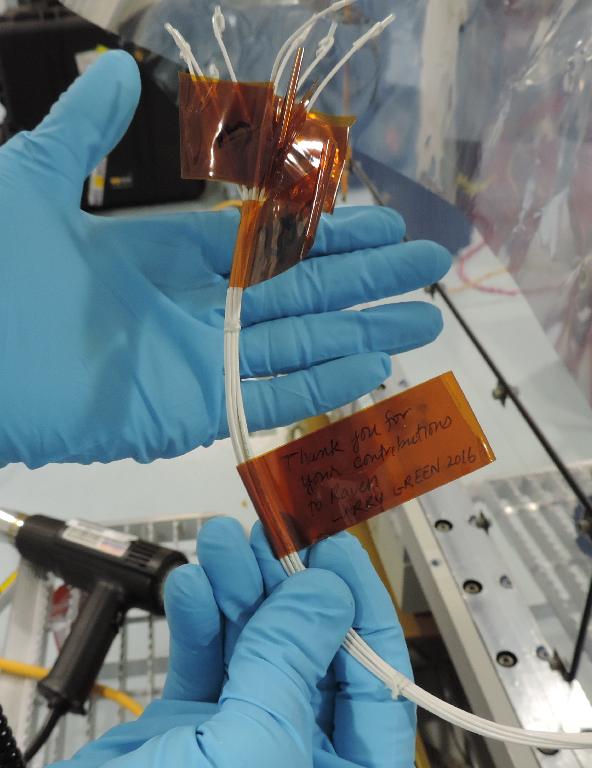
The memento reads:
Thank you for your contributions to Raven
Larry Green 2016.
During
the first week of March 2017 we did our first Ops in space.
That
included the first power on of SpaceCube 2 and checking its telemetry.
Then a few days later, we fired the launch locks that hold us
down for launch and then lifted the sensor head out of the hibernate
position. We then took our "first light" image.
The moment we celebrated was the launch locks firing correctly,
which released Raven out of the hibernate position.
You can see the blip on the screen in the background.

Here is the blip on the screen showing successful firing of the launch locks.
If this did not occur, we would have no mission.

Our "first light" image. Looking down onto the Atlantic Ocean.
A modest image for sure, but we are proud of it.

In April 2017, we did our first tracking of an incoming spacecraft. It
was of Cygnus OA-7. Tracking was very successful and it was a proud
moment to see this.

In early 2018, I received this certificate of appreciation for my work on Raven and STP-H5.

In Spring 2018, we received an RHG Exceptional Achievement Award.

In Fall 2021, we received this image from H5. You can see Raven on the left and
this is nightfall at ISS.
Close image of Raven on H5.
Next Project: RRM3. The third phase of buildup for RRM.
Links
- VNS LIDAR for Raven (STORRM).
- NASA's page for STORRM.
- Infra-red camera for Raven (SPACE-IR).
- The SM-4 RNS camera.
- Raven on nasa.gov.
- Article on Av Week quoting Gerstenmaier mentioning the virtues of Raven (12/15).
- Presentation on SpaceCube1 including photo of STP-H5.
- STP-H5
subsystems info.