| Home | Job | Pinball | Photo Album | Automotive | Press/Awards | Contact |

{kind=link}
The Contact
Dynamics Facility (CDF)
In general, space robots are more floppier (mechanically flexible) than
robots used on the ground. This is because it is expensive to
launch a lot of mass (weight) into space, and the microgravity
environment in space allows the joints of the arm to be much weaker
than a ground robot. As a result of these factors, space
robots
tend to be long and comparatively floppy. A commonly known
example of this is the Space
Shuttle
Remote Manipulator (SRMS).
The above traits also means that it can be difficult to use the space robot on the ground. This is true in the case of the robotic systems for the HRSDM. Both the long Grapple Arm and the Dexterous Robot arms cannot be used on earth. In order to completely verify that our tools and procedures will work, we need to either hang the robot with cables to reduce the effect of gravity, or we need to simulate its motion with mathematical models of the robot arm.
This second approach is what we intend to pursue to verify our tools and procedures. I proposed to the HST project that we build a robotic simulator that uses mathematical models to preduct the motion of the flexible robot system, but use a strong industrial robot arm to execute the motions. In this manner, we can pick up heavy tools and instrument simulators without worrying about how to reduce the effects of gravity. Since this system will be used to verify tasks with contact dynamics, I have named this laboratory, the HRSDM Contact Dynamics Facility (CDF).
This kind of approach to tools and task verification is similar to that used by other space agencies such as the Canadian Space Agency.
The above traits also means that it can be difficult to use the space robot on the ground. This is true in the case of the robotic systems for the HRSDM. Both the long Grapple Arm and the Dexterous Robot arms cannot be used on earth. In order to completely verify that our tools and procedures will work, we need to either hang the robot with cables to reduce the effect of gravity, or we need to simulate its motion with mathematical models of the robot arm.
This second approach is what we intend to pursue to verify our tools and procedures. I proposed to the HST project that we build a robotic simulator that uses mathematical models to preduct the motion of the flexible robot system, but use a strong industrial robot arm to execute the motions. In this manner, we can pick up heavy tools and instrument simulators without worrying about how to reduce the effects of gravity. Since this system will be used to verify tasks with contact dynamics, I have named this laboratory, the HRSDM Contact Dynamics Facility (CDF).
This kind of approach to tools and task verification is similar to that used by other space agencies such as the Canadian Space Agency.

Artist conception of the CDF. The Ground Trainer from MDA is shown on the left with its system of cables to reduce the effects of gravity.
The CDF robot is on the right (yellow). In the middle (green), is a model of the Hubble Aft Shroud, which simulates the hardware on HST.
This image from Brentford Powell.
An example, of the industrial manipulator that we will use for the CDF.
This is a Fanuc 430 that has a payload capacity of about 300 pounds
and a reach in excess of 8 feet.
This image from here.

The industrial robot will be controlled from a software simulation that includes the dynamic models of the HST/HRV stack, the long Grapple Arm, the two Dexterous Robots, and their joints. Here I am operating the simulation system with their joystick controllers. On the screen one can see the graphical representation of the motion of the system. In the future, that motion will be sent to the robot so that it can move according to the simulation. A force-moment sensor at the wrist of the industrial robot will feed forces back into the simulation, closing the force-motion loop. So as I move the simulated robot around on the screen, so will the physical robot move in the lab.
This and the next three photographs are by Chris Gunn (GSFC photographer).

In March 2005, during our PDR, Dr.
Riccardo Giacconi, a Nobel Laureate visited our Robotics Lab
facility and operated the simulator. In the fore ground, from left to right: Steve Queen (one of the
developers of the simulator), Dr. Giacconi, Dr.
Weiler (GSFC Director), Frank Cepollina
(Hubble Mission Manager - with hand waving), John
Lymer (Chief Engineer), Jill Holz (Robotics Program Manager). In the background, we
can
see a model of the entire Ejection Module with a model of the Dexterous Robot visible (white).
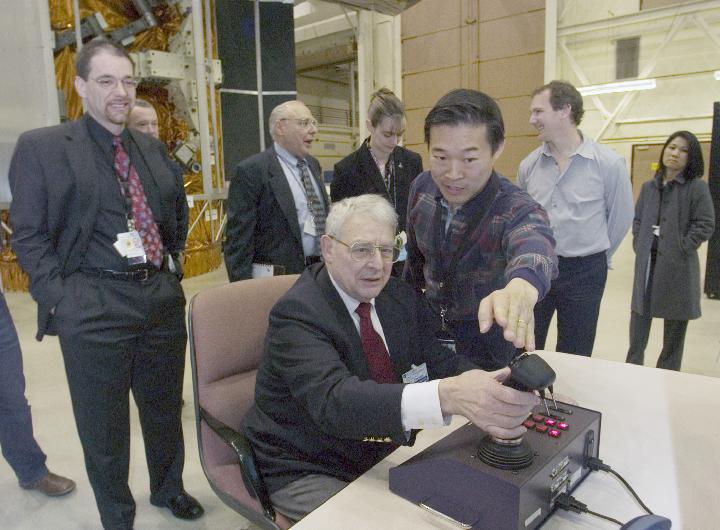
We asked Dr. Giacconi to have a try at the simulator. Here,
he is
holding the Rotational Hand Controller (RHC). This commands the
robot end-effector in the rotational degrees-of-freedom. In
the background from left to right: Jim Corbo (Lead Systems), Frank
Cepollina, Jill Holz, John Lymer, Carol Wong (Johnson Space
Center).

He quickly got the hang of it and was able to 'drive' the robot around the model of the Hubble Space Telescope.
We concluded the Preliminary Design Review on March 25 2005, and both the Goddard Review Team and the Independent Review Team agreed that we were well prepared and ready for work towards our next major milestone, which is the Critical Design Review in September. We were encouraged by this, and hope that the new NASA Administrator will restore funds in Fiscal Year 2006 in order to extend the life of HST.
Our
Preliminary Design Review (PDR) in the news
In April 2005, we were
directed to stop
work on the HRSDM. However, our progress with the robotic
tasks
has convinced NASA to
allow us to continue our work in robotics. Preparations to
assemble the CDF are continuing.

6/3/05. Arrival of the Fanuc S-430iF in a big box.

After the box was opened, the robot was transferred by forklift to the
lab area.

The robot setup in the future CDF lab. The HST Aft Shroud
Simulator/Trainer is shown on the right. On June 9, 2005,
HST hosted a visit by Mike Griffin (NASA's Administrator), and he
viewed the robot.
We have been using the
standard RJ3
controller to get us started, but the bandwidth of this unit is not
adequate.
In July, we placed an order for a high speed controller that will be
able of about 1000 Cartesian updates per second.
The controller will be from Robotic
Workspace Technologies.
Interview
with Walt Weisel, CEO of RWT on Wall Street Reporter.
This lab in the press: Spaceref
Article in a local Florida
paper on the robot controller.

More will be added as this lab develops.
Links:
Main Robotic Mission Page
� Edward Cheung, all rights reserved 2005.