| Home | Job | Pinball | Photo Album | Automotive | Press/Awards | Contact |

{kind=link}
COS changeout
with Capaciflectors
My previous work in the GSFC robotic lab in the early nineties was with a proximity sensor called the Capaciflector that was invented at our lab. It is a sensor that works on the capacitance of an approaching object, and is very accurate at close range (less than 0.5"). The range can be as large as one foot for certain designs.
One nice aspect of this
type of
sensor is that the sensing elements are conductors, allowing the
surface of tools to be the sensors themselves. This is
illustrated in the figure below. The bottom most part of this
tool is a 7/16" nutdriver with three sensors that provide enough data
to the control system to allow it to center and hover over a bolt head.
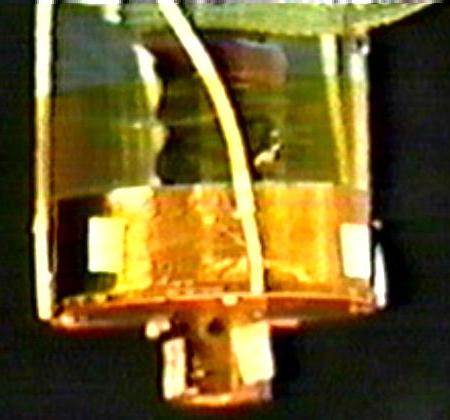
Capaciflector sensors on a socket driver (bottom most part)

The Capaciflector was used in various tests including this one with a large arm holding a mockup of an HST
instrument in front of the HST mockup. This arm was built by the Robotics Research Corporation.
This photo was shot before the application of sensors on the elbow of the arm for the purposes
of obstacle avoidance.
As mentioned above, the
preceding
work was done in the early nineties at the GSFC Robotics Lab.
Our
initial tests with the COS mockup and the Ground Testbed (GT) robot arm
showed us that a sensor such as the Capaciflector would be useful for
the final alignment of the instrument into HST.
Using a modified version of the sensor developed several years ago, I designed and built a module consisting of eight sensors that are battery powered and that communicate with a central computer by radio link. This allowed the robot to grasp the mockup and have sensors available for final alignment without needing to bother with electrical cables.
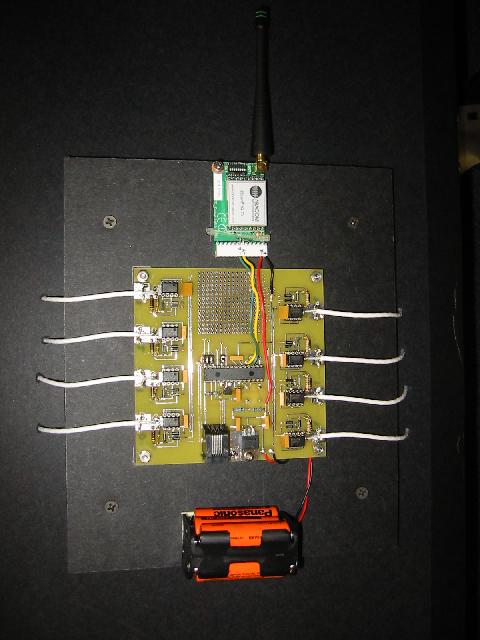
Circuit board with the microprocessor and eight sensors. The system
is battery powered and works via an RF link. Each of the eight sensors
are connected by the white coaxial cables on the side.

Completed COS science instrument mockup with the sensor circuit. Range is about one foot for the
sensors and drift was extremely low. The sensors each produce a frequency in the 50kHz range to
indicate proximity, and the drift is less than 10 Hz over several hours.

The back of the mockup showing one of the eight sensors. Others are on the right side of the image.
Three sensors are located in the back (facing HST), and the other five are for aligning to the guiderails
on the top and bottom of the instrument.
View of the robot (same as the one here) performing the extraction and insertion of the
COS mockup in our High Fidelity Mechanical Simulator. The instrument has to be
positioned with no more than 0.16" of error.

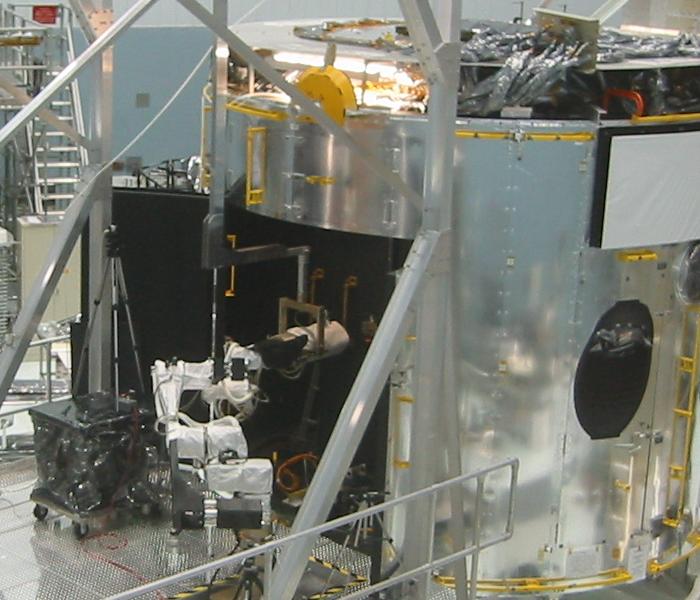
Another view of the task. In the right background the actual flight instrument (COS) is visible in its storage
container. The bottom guiderail for the instrument can be seen near the floor level of the robot platform
(yellow/white bar extending into HST). There is also another similar one in the top right of the instrument.
Both are used to guide the instrument to its final location.

The operator at his workstation. On his left is the translational handcontroller. This moves
the robot's position (x, y, z). On his right is the rotational handcontroller, which moves
the robot's orientation (roll, pitch and yaw). This is the same setup that is used by
Shuttle astronauts to fly the shuttle and run the Shuttle robot arm.
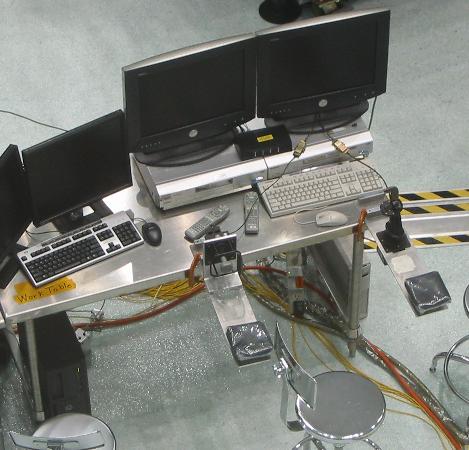
Top view of operator station.

Sensor readings are fed to a central computer which displays for the operator
which handcontroller commands to use to berth the science instrument into
its proper location. Each set of arrows corresponds to one of the handcontrollers.
The graphics for the arrows are by Jesse Clark, and
the algorithms and the main program were written by me.

By following the commands on the display, the operator is able to position the instrument to
no more than 0.04" (1mm) of error. This guidance can not be obtained from cameras or any
other means showing the importance of proximity sensors for this application.
Using a modified version of the sensor developed several years ago, I designed and built a module consisting of eight sensors that are battery powered and that communicate with a central computer by radio link. This allowed the robot to grasp the mockup and have sensors available for final alignment without needing to bother with electrical cables.
Circuit board with the microprocessor and eight sensors. The system
is battery powered and works via an RF link. Each of the eight sensors
are connected by the white coaxial cables on the side.
Completed COS science instrument mockup with the sensor circuit. Range is about one foot for the
sensors and drift was extremely low. The sensors each produce a frequency in the 50kHz range to
indicate proximity, and the drift is less than 10 Hz over several hours.
The back of the mockup showing one of the eight sensors. Others are on the right side of the image.
Three sensors are located in the back (facing HST), and the other five are for aligning to the guiderails
on the top and bottom of the instrument.
View of the robot (same as the one here) performing the extraction and insertion of the
COS mockup in our High Fidelity Mechanical Simulator. The instrument has to be
positioned with no more than 0.16" of error.
Another view of the task. In the right background the actual flight instrument (COS) is visible in its storage
container. The bottom guiderail for the instrument can be seen near the floor level of the robot platform
(yellow/white bar extending into HST). There is also another similar one in the top right of the instrument.
Both are used to guide the instrument to its final location.
The operator at his workstation. On his left is the translational handcontroller. This moves
the robot's position (x, y, z). On his right is the rotational handcontroller, which moves
the robot's orientation (roll, pitch and yaw). This is the same setup that is used by
Shuttle astronauts to fly the shuttle and run the Shuttle robot arm.
Top view of operator station.
Sensor readings are fed to a central computer which displays for the operator
which handcontroller commands to use to berth the science instrument into
its proper location. Each set of arrows corresponds to one of the handcontrollers.
The graphics for the arrows are by Jesse Clark, and
the algorithms and the main program were written by me.
By following the commands on the display, the operator is able to position the instrument to
no more than 0.04" (1mm) of error. This guidance can not be obtained from cameras or any
other means showing the importance of proximity sensors for this application.
The initial tests with
the
Capaciflector were performed in July 2004, and then repeated in
September 2004. Consistent performance with both trials show
that
the drift and stability of the sensor is very good, and would be a
useful addition to the mission.
Links
Links
- Michigan
State University team that will take a mobile robot to the
Antarctic to try this task.
(c) Edward Cheung